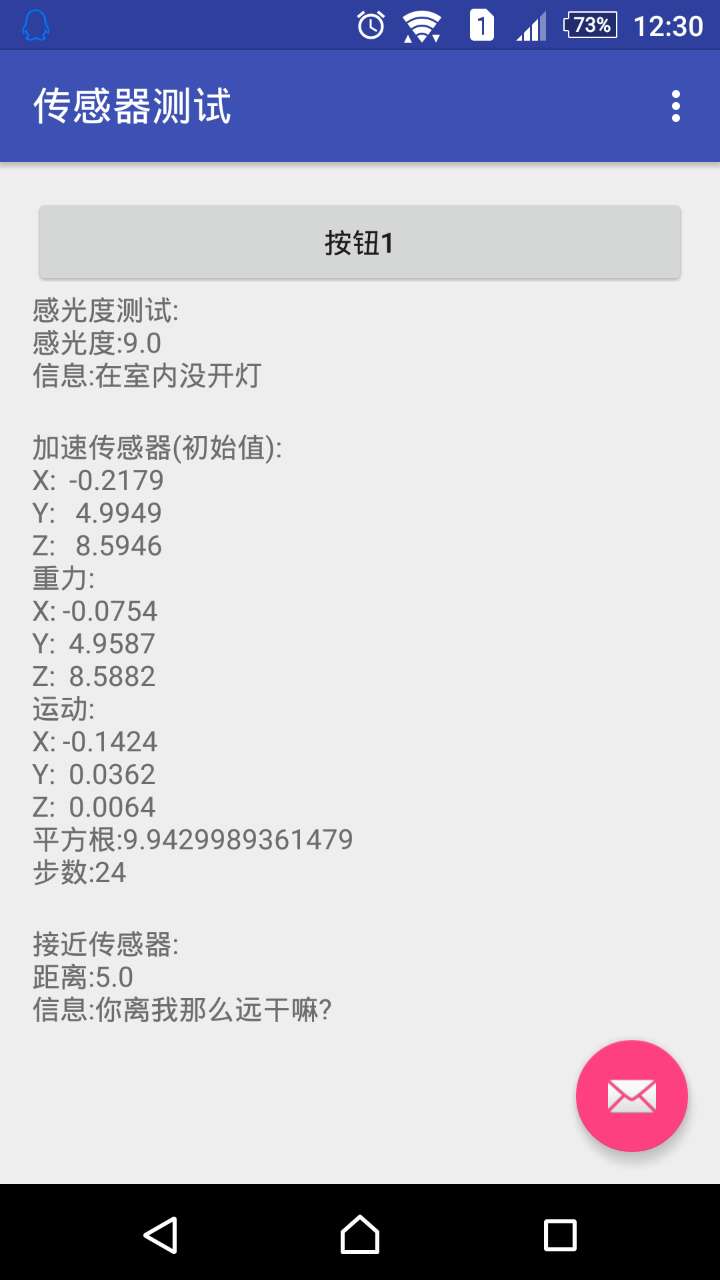
直接上代码吧,一会再加一张图片:
package com.lanxin.testsensor;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.support.design.widget.FloatingActionButton;
import android.support.design.widget.Snackbar;
import android.support.v7.app.AppCompatActivity;
import android.support.v7.widget.Toolbar;
import android.view.View;
import android.view.Menu;
import android.view.MenuItem;
import android.view.WindowManager;
import android.widget.Button;
import android.widget.TextView;
import java.util.List;
public class MainActivity extends AppCompatActivity implements SensorEventListener {
private static final String TAG = "TestSensorLog";
private TextView textView,textview2,textview3;
private Button but1;
private FloatingActionButton fab;
private SensorManager sensorManager;
private List<Sensor> sensor;
private Sensor light,proximity,accelerometer;
private Context mContext;
private int mRotation;
private float[] motion = new float[3];
private float[] gravity = new float[3];
private int count = 0;
String str;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
Toolbar toolbar = (Toolbar) findViewById(R.id.toolbar);
setSupportActionBar(toolbar);
fab = (FloatingActionButton) findViewById(R.id.fab);
fab.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View view) {
Snackbar.make(view, "Replace with your own action", Snackbar.LENGTH_LONG)
.setAction("Action", null).show();
}
});
init();
}
private void init() {
mContext = this;
but1 = (Button) findViewById(R.id.but1);
textView = (TextView) findViewById(R.id.textview);
textview2 = (TextView) findViewById(R.id.textview2);
textview3 = (TextView) findViewById(R.id.textview3);
sensorManager = (SensorManager) getSystemService(SENSOR_SERVICE);
sensor = sensorManager.getSensorList(Sensor.TYPE_ALL);
light = sensorManager.getDefaultSensor(Sensor.TYPE_LIGHT);
proximity = sensorManager.getDefaultSensor(Sensor.TYPE_PROXIMITY);
accelerometer = sensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
but1.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View view) {
StringBuilder sb = new StringBuilder();
for (Sensor s:sensor){
sb.append("传感器名称:"+s.getName()+"\n");
sb.append("传感器类型:"+s.getType()+"\n");
sb.append("传感器供应商:"+s.getVendor()+"\n");
sb.append("传感器版本:"+s.getVersion()+"\n");
sb.append("传感器分辨率:"+s.getResolution()+"\n");
sb.append("传感器最大射程:"+s.getMaximumRange()+"\n");
sb.append("传感器功率:"+s.getPower()+"\n");
sb.append("\n\n");
}
textView.setText(sb);
}
});
fab.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View view) {
sensorManager.registerListener((SensorEventListener) mContext,light,
SensorManager.SENSOR_DELAY_NORMAL);
sensorManager.registerListener((SensorEventListener) mContext, proximity,
SensorManager.SENSOR_DELAY_NORMAL);
sensorManager.registerListener((SensorEventListener) mContext, accelerometer,
SensorManager.SENSOR_DELAY_NORMAL);
}
});
WindowManager window = (WindowManager) this.getSystemService(WINDOW_SERVICE);
mRotation = window.getDefaultDisplay().getRotation();
}
@Override
protected void onPause() {
super.onPause();
sensorManager.unregisterListener(this, light);
sensorManager.unregisterListener(this, proximity);
sensorManager.unregisterListener(this,accelerometer);
}
@Override
public boolean onCreateOptionsMenu(Menu menu) {
// Inflate the menu; this adds items to the action bar if it is present.
getMenuInflater().inflate(R.menu.menu_main, menu);
return true;
}
@Override
public boolean onOptionsItemSelected(MenuItem item) {
// Handle action bar item clicks here. The action bar will
// automatically handle clicks on the Home/Up button, so long
// as you specify a parent activity in AndroidManifest.xml.
int id = item.getItemId();
//noinspection SimplifiableIfStatement
if (id == R.id.action_settings) {
return true;
}
return super.onOptionsItemSelected(item);
}
@Override
public void onSensorChanged(SensorEvent sensorEvent) {
float val = sensorEvent.values[0];
String tag = "";
switch (sensorEvent.sensor.getType()){
case Sensor.TYPE_LIGHT:
if (val < 20){
tag = "在室内没开灯";
}else if (val < 500 && val > 20){
tag = "在室内并开灯了";
}else if (val < 3000 && val > 499){
tag = "你在室外";
}else if (val > 3000){
tag = "你在晒太阳吗?";
}
textView.setText("感光度测试:\n"+
"感光度:"+val+"\n" +
"信息:"+tag+"\n"
);
break;
case Sensor.TYPE_PROXIMITY:
textview3.setText("接近传感器:\n"+
"距离:"+val+"\n" +
"信息:"+(val == 0 ? "走开别靠近我" : "你离我那么远干嘛?")+"\n"
);
break;
case Sensor.TYPE_ACCELEROMETER:
count++;
tag = String.format("加速传感器(初始值):\nX: %8.4f\nY: %8.4f\nZ: %8.4f\n",
sensorEvent.values[0], sensorEvent.values[1], sensorEvent.values[2]);
//低通过滤
for (int i=0;i<3;i++){
gravity[i] = (float) (0.1 * sensorEvent.values[i] + 0.9 * gravity[i]);
motion[i] = sensorEvent.values[i] - gravity[i];
}
double ratio = gravity[1] / SensorManager.GRAVITY_EARTH;
if(ratio > 1.0) ratio = 1.0;
if(ratio < -1.0) ratio = -1.0;
//角度的计算
double Angle = Math.toDegrees(ratio);
if(gravity[2] < 0){
Angle = -Angle;
}
double gravityNew = Math.sqrt(
sensorEvent.values[0] * sensorEvent.values[0] +
sensorEvent.values[1] * sensorEvent.values[1] +
sensorEvent.values[2] * sensorEvent.values[2]
);
tag += String.format("重力:\nX:%8.4f\nY:%8.4f\nZ:%8.4f\n", gravity[0],gravity[1],gravity[2]);
tag += String.format("运动:\nX:%8.4f\nY:%8.4f\nZ:%8.4f\n", motion[0],motion[1],motion[2]);
tag += "角度:"+Angle+"\n平方根:"+gravityNew+"\n步数:"+stepNUM+"\n";
countStep((float) gravityNew);
if(count > 10){
count = 0;
textview2.setText(tag);
}
break;
}
}
/**
* 检测步子,并开始计步
* @param val
*/
private void countStep(float val){
if(stepOld == 0){
stepOld = val;
}else {
if(DetectorPeak(val,stepOld)){
timeOfLastPeak = timeOfThisPeak;
timeOfNow = System.currentTimeMillis();
if(timeOfNow - timeOfLastPeak >= 250
&& (peakOfWave - valleyOfWave >= ThreadValue)){
timeOfThisPeak = timeOfNow;
//步数累计
stepNUM++;
}
if(timeOfNow - timeOfLastPeak >= 250
&& (peakOfWave - valleyOfWave > initialValue)){
timeOfThisPeak = timeOfNow;
ThreadValue = Peak_Valley_Thread(peakOfWave - valleyOfWave);
}
}
}
stepOld = val;
}
int stepNUM = 0;
float stepOld = 0;
boolean isDirectionUp = false;//是否上升的标志位
boolean lastStatus = false;//上一点的状态,上升还是下降
int continueUpCount = 0;//持续上升次数
int continueUpFormerCount = 0; //上一点的持续上升的次数,为了记录波峰的上升次数
float peakOfWave = 0;//波峰值
float valleyOfWave = 0; //波谷值
long timeOfLastPeak = 0L;
long timeOfThisPeak = 0L;
long timeOfNow = 0L;
float ThreadValue = (float) 2.0;//初始阈值
float initialValue = (float) 1.3;//动态阈值需要动态的数据,这个值用于这些动态数据的阈值
//计算波峰阈值的数据
int tempCount = 0;
int valueNum = 4;
float[] tempValue = new float[valueNum];//用于存放计算阈值的波峰波谷差值
/**
* 检测波峰
* @param newVal
* @param oldVal
* @return
*/
private boolean DetectorPeak(float newVal,float oldVal){
lastStatus = isDirectionUp;
if(newVal >= oldVal){
isDirectionUp = true;
continueUpCount++;
}else {
continueUpFormerCount = continueUpCount;
continueUpCount = 0;
isDirectionUp = false;
}
if(isDirectionUp && lastStatus && (continueUpFormerCount >=2 || oldVal >= 11)){
peakOfWave = oldVal;
return true;
}else if (!lastStatus && isDirectionUp){
valleyOfWave = oldVal;
return false;
}else {
return false;
}
}
/**
* 阈值的计算
* @param val
* @return
*/
private float Peak_Valley_Thread(float val){
float temp = ThreadValue;
if(tempCount < valueNum){
tempValue[tempCount] = val;
tempCount++;
}else {
temp = averageValue(tempValue,valueNum);
for (int i=1; i<valueNum;i++){
tempValue[i-1] = tempValue[i];
}
tempValue[valueNum-1] = val;
}
return temp;
}
/**
* 梯度化阈值
* @param val
* @param n
* @return
*/
private float averageValue(float val[],int n){
float ave = 0;
for (int i=0; i < n; i++){
ave += val[i];
}
ave = ave / valueNum;
if(ave >= 8){
ave = (float)4.3;
}else if (ave >=7 && ave < 8){
ave = (float)3.3;
}else if (ave >=4 && ave < 7){
ave = (float)2.3;
}else if (ave >=3 && ave < 4){
ave = (float)2.0;
}else {
ave = (float)1.3;
}
return ave;
}
@Override
public void onAccuracyChanged(Sensor sensor, int i) {
// textview2.setText(
// "感光传感器:\n"+
// "名称:"+sensor.getName()+"\n" +
// "精准度:"+i+"\n" +
// "电量:"+sensor.getPower()+"\n" +
// "最大射程:"+sensor.getMaximumRange()+"\n"+
// "厂商:"+sensor.getVendor()+"\n" +
// "版本:"+sensor.getVersion()+"\n"
// );
}
}